Precisionsservo DC-motor 46S/185-8A

Grundläggande egenskaper hos servo DC-motor: (andra modeller, prestanda kan anpassas)
| 1. Märkspänning: | DC 7,4V | 5. Nominell hastighet: | ≥ 2600 rpm |
| 2. Driftspänningsområde: | DC 7,4V-13V | 6.Blockeringsström: | ≤2,5A |
| 3. Märkeffekt: | 25W | 7. Lastström: | ≥1A |
| 4. Rotationsriktning: | CW utgående axel är ovanför | 8. Axelspel: | ≤1,0 mm |
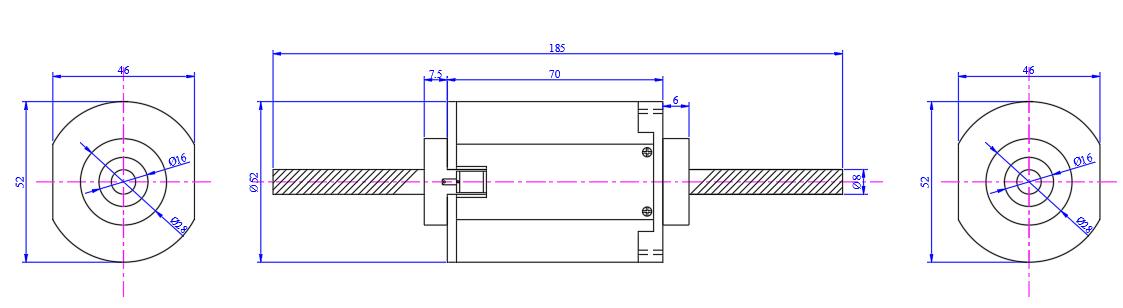
Produktens utseende diagram
Utgångstid
Sedan produktionsdatumet är den säkra användningsperioden för produkten 10 år och den kontinuerliga arbetstiden är ≥ 2000 timmar.
Produktegenskaper
1. Kompakt, utrymmesbesparande design;
2. Kullagerstruktur;
3.Lång livslängd för borsten;
4. Extern tillgång till borstar gör det enkelt att byta ut för att ytterligare förlänga motorns livslängd;
5.Högt startmoment;
6. Dynamisk bromsning för att stanna snabbare;
7.Reversibel rotation;
8. Enkel tvåtrådsanslutning;
9. Klass F-isolering, högtemperatursvetskommutator.
10.Hög prestanda, hög kostnadsprestanda och låg störning.
Ansökningar
Det används ofta inom områdena smarta hem, precisionsmedicinska apparater, bildrivning, hemelektronikprodukter, massage- och hälsovårdsutrustning, verktyg för personlig vård, intelligent robotöverföring, industriell automation, automatisk mekanisk utrustning, digitala produkter, etc.
Prestanda illustration



Servosystem: Det är ett automatiskt styrsystem som gör det möjligt för utgående styrda storheter såsom position, orientering och tillstånd för ett objekt att följa varje förändring i ingångsmålet (eller givet värde). Servots huvuduppgift är att förstärka, transformera och reglera kraften enligt kraven i styrkommandot, så att vridmoment, hastighet och positionsutgång från drivanordningen kan styras mycket flexibelt och bekvämt.
På grund av dess "servo"-prestanda kallas den för en servomotor. Dess funktion är att omvandla ingångsspänningsstyrsignalen till utgående vinkelförskjutning och vinkelhastighet på axeln för att driva styrobjektet.
Principen för DC-servomotorn
Arbetsprincipen för DC-servomotor är i princip densamma som för en vanlig DC-motor. Det elektromagnetiska vridmomentet genereras av verkan av armaturens luftflöde och luftgapets magnetiska flöde för att få servomotorn att rotera. Vanligtvis används ankarstyrmetoden för att ändra hastigheten genom att ändra spänningen samtidigt som excitationsspänningen hålls konstant. Ju mindre spänning, desto lägre hastighet, och när spänningen är noll slutar den att rotera. För när spänningen är noll är strömmen också noll, så motorn kommer inte att generera elektromagnetiskt vridmoment, inte heller kommer det att uppträda som fenomenet självrotation.







